
 下载APP
下载APP 报料
报料 关于
关于
解放军报 2024-05-06 16:16:37
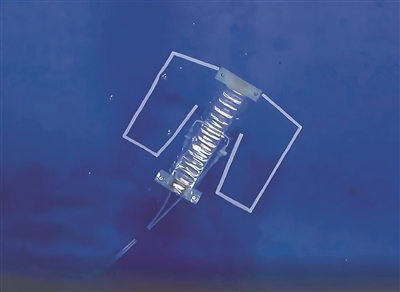
软体两栖机器人
近日,北京大学某研究团队研制出了一款具有多种运动模态的软体两栖机器人,相关成果已发表于《IEEE机器人学汇刊》杂志。据悉,除了高机动性外,该机器人对多种地形的适应能力也较为出色,可以完成攀登斜坡、跨越障碍物、爬升台阶等高难度动作,同时能采用蠕动方式在狭窄的缝隙中穿行。
先后受到果蝇幼虫和海蛞蝓独特的运动模式启发,研究人员采用了一种由4层薄型气动执行器组成的驱动系统,使该机器人能在陆地和水生环境中执行前进、后退、转弯、自翻等丰富动作。
研究人员称,该机器人在生态敏感区域应用中表现出高潜力,是在非结构化场景下执行信息监测、资源勘探和灾难救援等多元化任务的理想选择。
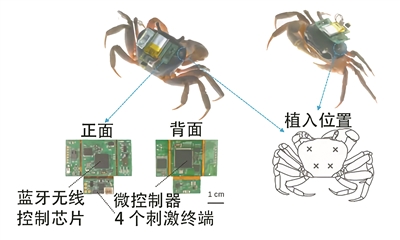
螃蟹仿生机器人
近日,《软体机器人》杂志刊文称,新加坡南洋理工大学研究人员研制出一款螃蟹仿生机器人。
传统机器人往往依靠轮胎或履带与地面接触及摩擦产生向前的推进力,这大大限制了其在水中或其他低重力环境下的机动性。
面对这一问题,研究人员们想到,借鉴生物自身的推进机制,与微机电系统组成“生物-机械混合系统”或许能成为一种解决方案。
在广泛的生物载体中,螃蟹具有独特的步态,同时,螃蟹在水中使用腮进行气体交换,可以在水下长期停留而不需要浮到水面上。这些特性使螃蟹成为构建仿生水陆两栖机器人的良好载体。基于此,研究团队构建的螃蟹仿生机器人实现了从陆地到水中的平稳过渡。
据称,该机器人在海滨环境中的狭窄区域具有广泛应用潜力,未来可用于执行管道探测、侦察和救灾等任务。

自组织模块化机器人
前不久,美国芝加哥大学研究团队研制出一款自组织模块化机器人,该机器人拥有出色的分裂、重组能力,可根据环境变化灵活调整自身形态。该项成果刊登在《科学机器人》杂志上。
该机器人由一组简洁的圆柱形齿轮装置构成,装有2块可绕圆柱轴旋转的磁铁,通过磁力实现各单元间的连接,并在各单元相互耦合时,推动邻近单元的旋转。
此外,研发人员利用该机器人可灵活调整自身形态的特性,制造了一种柔软的机器人抓手,这种抓手可以抓取和固定任意形状的物体。
据介绍,该机器人可以爬进“犄角旮旯”,或者深入其他不确定的地形结构,在执行搜救任务等领域展现出广阔的应用前景。(胡世坚 宋美洋 李欣衍)
责编:姜河
一审:姜河
二审:张马良
三审:熊佳斌
来源:解放军报
我要问
 湘公网安备 43010502000374号
湘公网安备 43010502000374号